2022. márc. 22.
A Széchenyi István Egyetem kutatói egy olyan algoritmust fejlesztettek ki, amely gyorsan, valós időben képes útpadkát és szabad út területet felismerni 3D LIDAR adatokból.
Az ARNL konzorcium tagjaként a Széchenyi István Egyetem a környezetérzékelés területén végez kutatási feladatokat. A kutatóközpontban kifejlesztésre került egy olyan algoritmus, amely 3D LIDAR adatokból tud útpadkát és szabad út területet, gyorsan, valós időben (minimum 20 Hz sebességgel) felismerni. A munka érdekessége, hogy az ehhez kapcsolódó algoritmus publikálásán túl a teljes forráskód, valamint példa adatok is elérhetőek. Így az eredmények teljes egészében reprodukálhatóak bárki számára. Ennek elérhetősége: https://github.com/jkk-research/urban_road_filter .
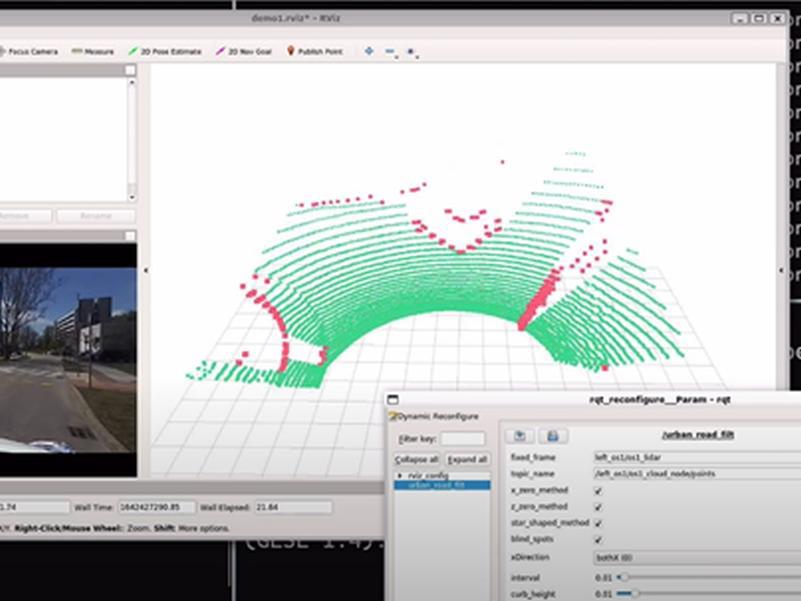
A videóban egy példán keresztül szemléltetjük a használatot: letöltjük a nyers LIDAR adatokat, elindítjuk ennek lejátszását, majd magát az algoritmust és a vizualizációt is. A szemléltetéshez használt járműves példa mérések a Széchenyi István Egyetem campusán illetve a ZalaZone járműipari tesztpályán készültek.