Széchenyi Terv Plusz | Magyarország Kormánya. Az Európai Unió finanszírozásával. NextGeneration EU.
EN
HU
Aktualitások
Hírek
Események
Zárókiadvány
Kutatás-fejlesztés
Alkalmazási területek
Kutatási témakörök
Erőforrások
Publikációk
Vezető kutatók
Partnerség
Konzorciumi tagok
Nemzetközi partnerek
Ipari kapcsolatok
Egyetemi kapcsolatok
Címlap
Kutatási témakörök
Irányítástervezési stratégiák
Alapkutatások a modellezés, modellredukció és modell identifikáció, az adaptív, robusztus, valamint az elosztott és hálózatba kapcsolt rendszerek irányítása területein.
Járműdinamika és irányítás
A közúti forgalomban közlekedő járművek számára automatizált és autonóm funkciókhoz kapcsolódó irányítások analízis és szintézis módszereinek kutatása.
Kooperatív irányítás
Földi és légi járművek magasszintű összehangolt és biztonságos együttműködését megvalósító módszerek és technológiák kutatása és fejlesztése.
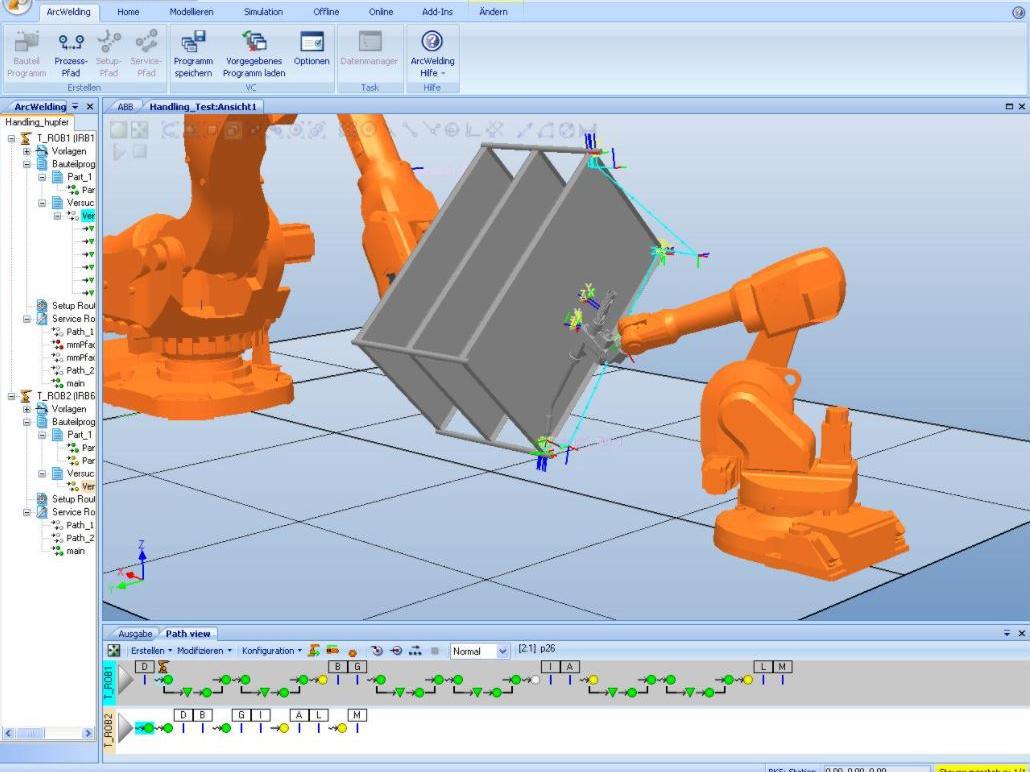
Robotikai modellezés és irányítás
Emberközpontú gyártásautomatizálás, ember-robot együttműködés, autonóm jármű flotta dinamikus működtetése, koordinálása.
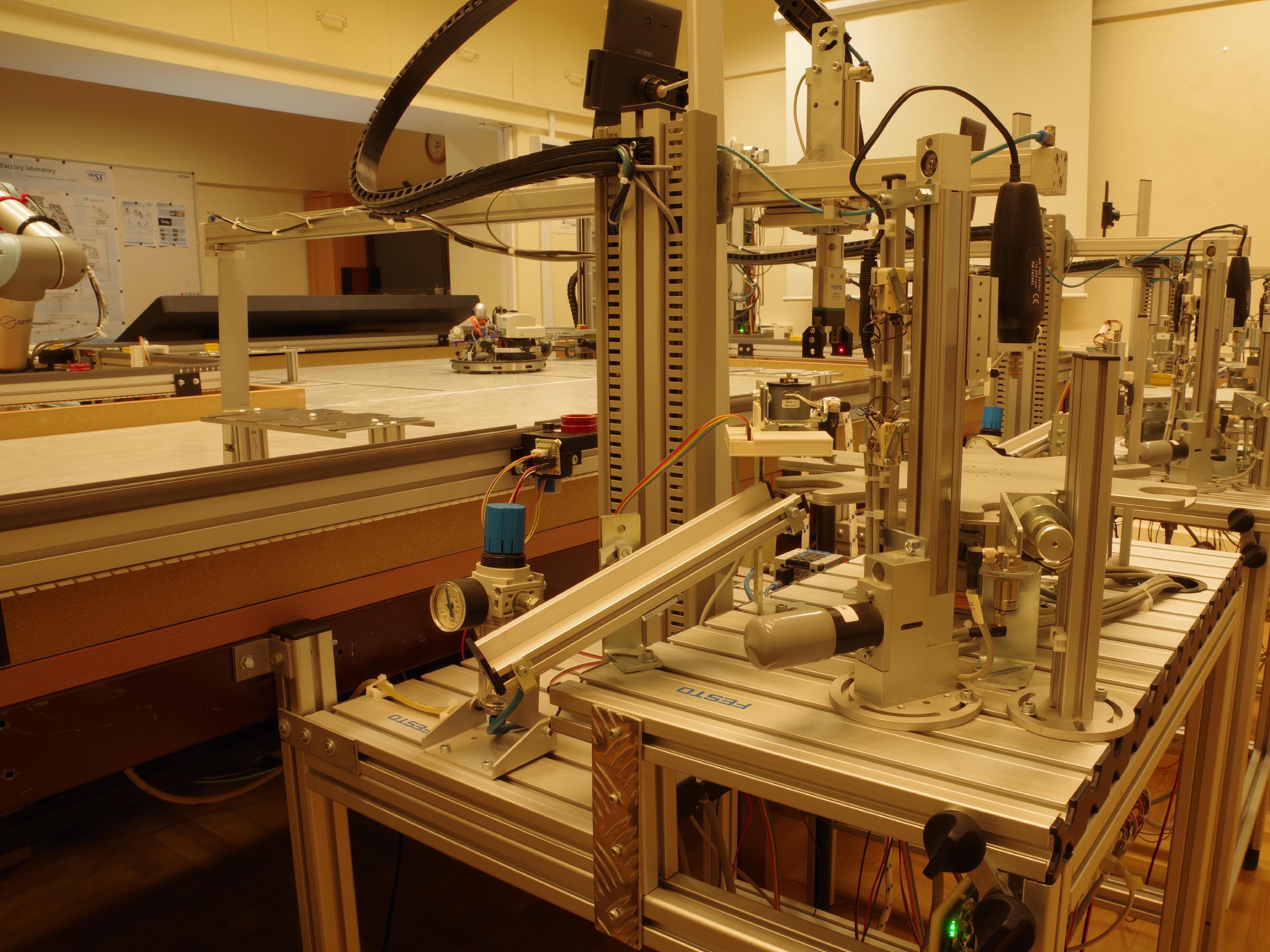
Alkalmazott kutatási infrastruktúra
Kísérleti közúti járműplatform, beltéri kísérleti járműlaboratórium (kvadkopterek, modellautók és mobil robotok együttműködésére), ill. felhő- és big data alapú kutatási platform kialakítása.
Járműirányítás
Hatékony számítási és optimalizálási módszerekre épülő korszerű irányítások kidolgozása, a modellezési folyamat automatizálása.
Infokommunikáció
Modellek és módszerek az autonóm közúti járművek és a rájuk épített mobilitási szolgáltatások integrálására a közlekedési rendszerbe.
Rendszerintegrációs kutatások
ZalaZONE Smart City jelzőlámpa irányító rendszerének koncepcionális tervezése és fejlesztése, környezetérzékelési kutatások, modellezés és szimuláció, dummy bábu fejlesztése.
Elektromobilitás
Hibadiagnosztikai modellrendszer, Li-ion akkumulátorok termikus modellezése, szimulációs környezet specifikációja.
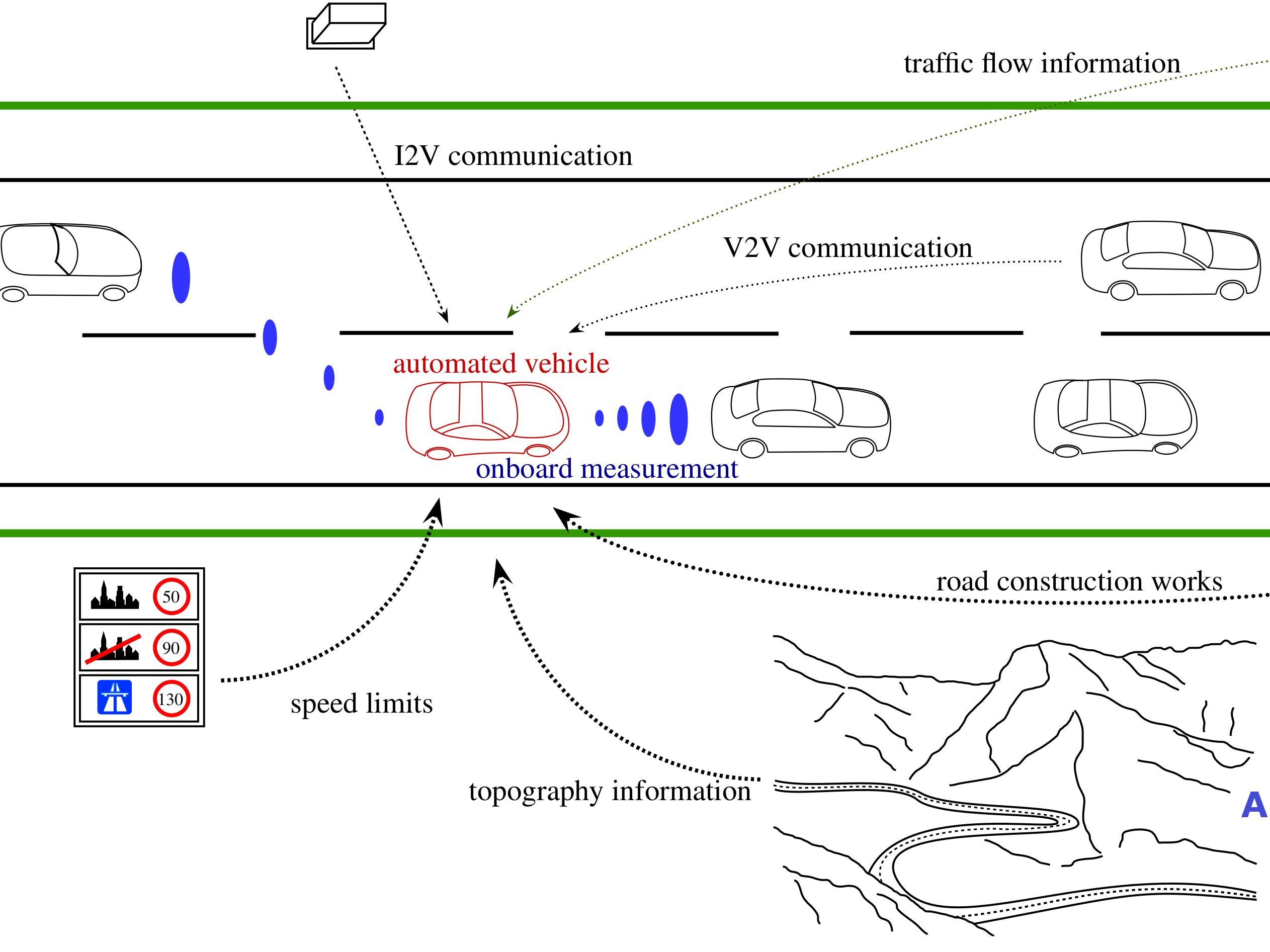
Autonóm járművek
Szenzorfúzióval kapcsolatos kutatások, globális és lokális útvonaltervezők, jármű-jármű és jármű-infrastruktúra kommunikáció.
Mobil robotizáció
Tesztpálya kialakító autonóm, mobil manipulátor, integrált robotkarral ellátott mobil platform kialakítása, szimulációs digitális iker fejlesztése.