Széchenyi Plan Plus | Government of Hungary. Funded by the European Union. NextGeneration EU.
EN
HU
Discover
News
Events
Report
Research & development
Areas of application
Research topics
Resources
Publications
Lead researchers
Partners
Consortium members
International partners
Industry contacts
University contacts
Home
Research topics
Control design approaches
Basic research in the fields of modeling, model reduction and model identification, adaptive, robust, and distributed and networked systems management.
Vehicle dynamics and control
Researching analysis and synthesis methods of control systems with automated and autonomous functionalities for road vehicles.
Cooperative control
Research and development of methods and technologies for high-level coordinated and safe cooperation between ground and areial vehicles.
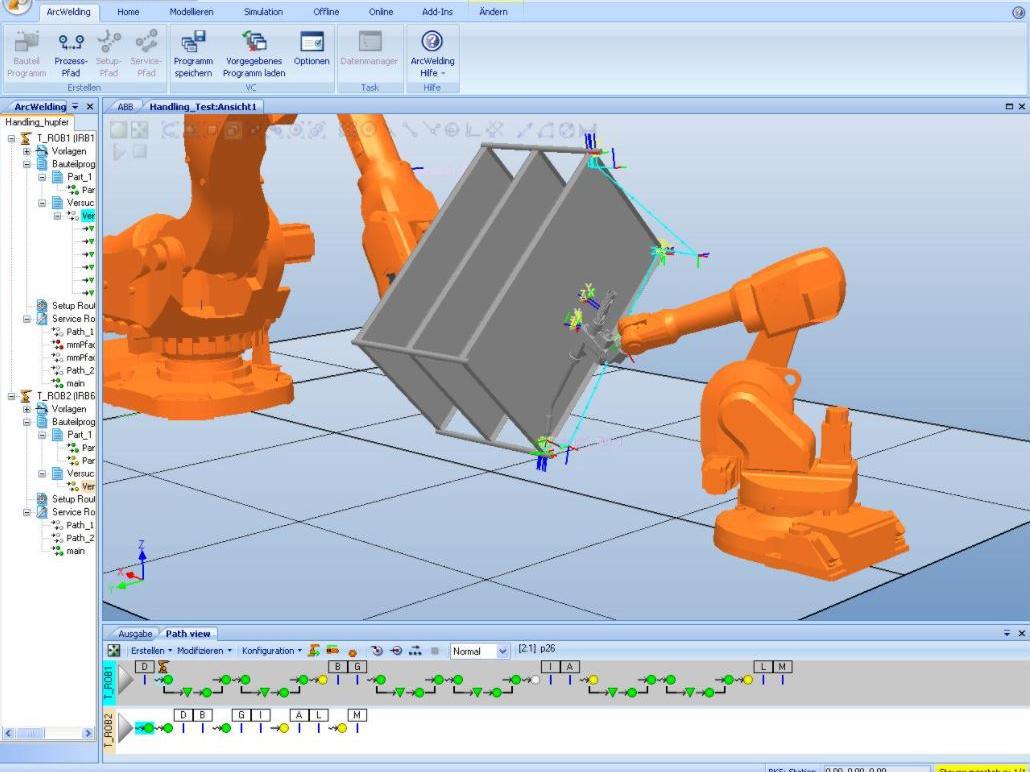
Robotic modeling and control
Human-centered production automation, human-robot cooperation, dynamic operation and coordination of an autonomous vehicle fleet.
Applied infrastructure
Developing an experimental road vehicle platform, an indoor experimental vehicle laboratory (for cooperation between quadcopters, model cars and mobile robots), and a cloud and big data based research platform.
Vehicle control
Development of modern controls based on efficient calculation and optimization methods, automation of the modeling process.
Infocommunication
Models and methods for integrating autonomous road vehicles and mobility services into the transport system.
Systems integration research
Conceptual design and development of ZalaZONE Smart City traffic light control system, environmental perception research, modeling and simulation, development of dummy.
Electromobility
Fault diagnostic model system, thermal modeling of Li-ion batteries, specification of simulation environment.
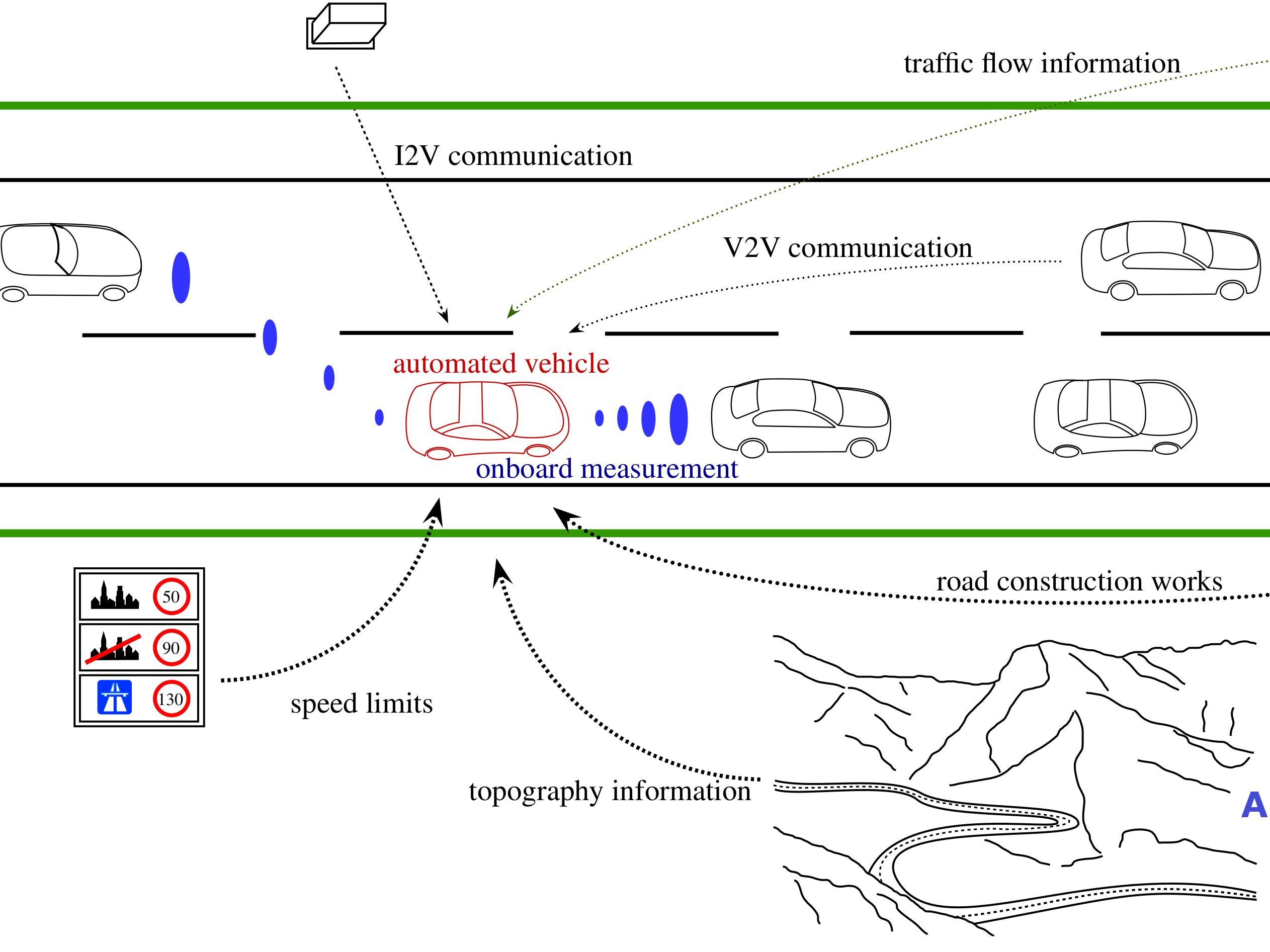
Autonomous vehicles
Sensor fusion research, global and local route planners, vehicle-to-vehicle and vehicle-infrastructure communication.
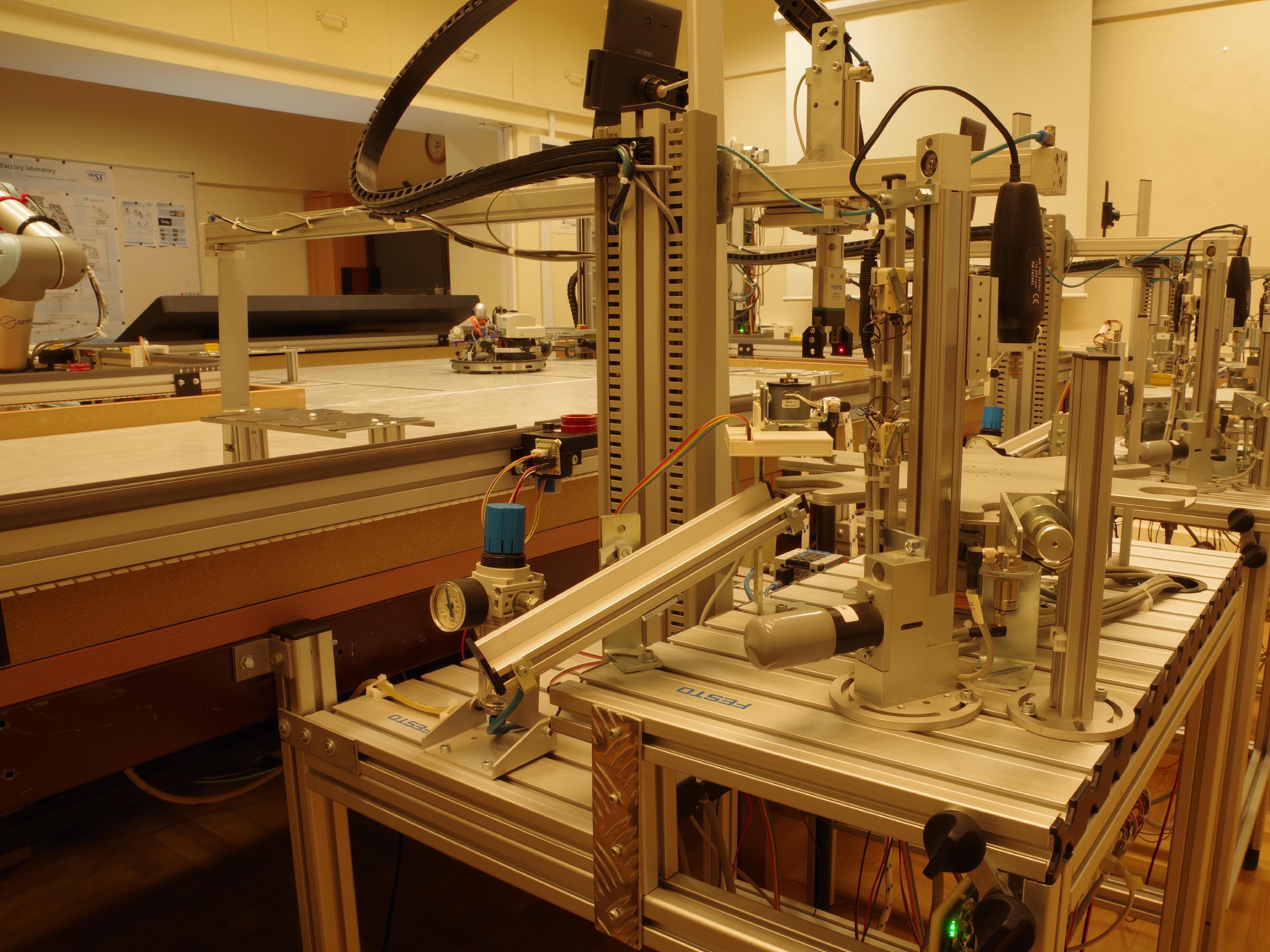
Mobile robotics
Development of an autonomous, mobile manipulator for creating test track, a mobile platform with an integrated robotic arm, development of a simulation digital twin.