Az Autonóm Rendszerek Nemzeti Laboratórium (ARNL) tagjai is részt vettek a Mesterséges Intelligencia Koalíció által június 15-én rendezett szakmai napon, valamint a június 16-án tartott nyilvános kiállításon. A Budapesti Műszaki és Gazdaságtudományi Egyetemen (BME) megrendezett eseményen a SZTAKI, a BME és a Széchenyi István Egyetem (SZE) fejlesztései is megtekinthetők voltak.
Június 15-én Palkovics László innovációs és technológiai miniszter és Pintér Sándor belügyminiszter is ellátogatott az MI Koalíció Szakmai napjára, amin a MILAB tagjai, az MI Koalíció partnerei, valamint a mesterséges intelligencia gyakorlati alkalmazásával foglalkozó vállalkozások mellett bemutatták legfrissebb szakmai eredményeiket és kiállították legújabb fejlesztéseiket az ARNL konzorciumi tagjai is.

Megtekinthető volt a SZTAKI Rendszer és Irányításelméleti Kutatólaboratóriuma és a győri SZE Járműipari Kutatóközpont közös fejlesztésű önvezető autója. A Nissan Leaf alapokra épülő autonóm jármű többféle érzékelővel is fel van szerelve, ezek segítségével tájékozódhat, akár a valós forgalomban is. Azok a látogatók, akik aktívan mozgó, önjáró járműveket szerettek volna látni, nem csalódtak. Láthattak ügyesen manőverező autonóm drónokat, vagy akár egy, a virtuális forgalomban közlekedő modellautót. Ez utóbbi egy virtuális, vagy akár valós körforgalomban mozog virtuálisan, s alkalmazkodik az ott mozgó többi járműhöz.

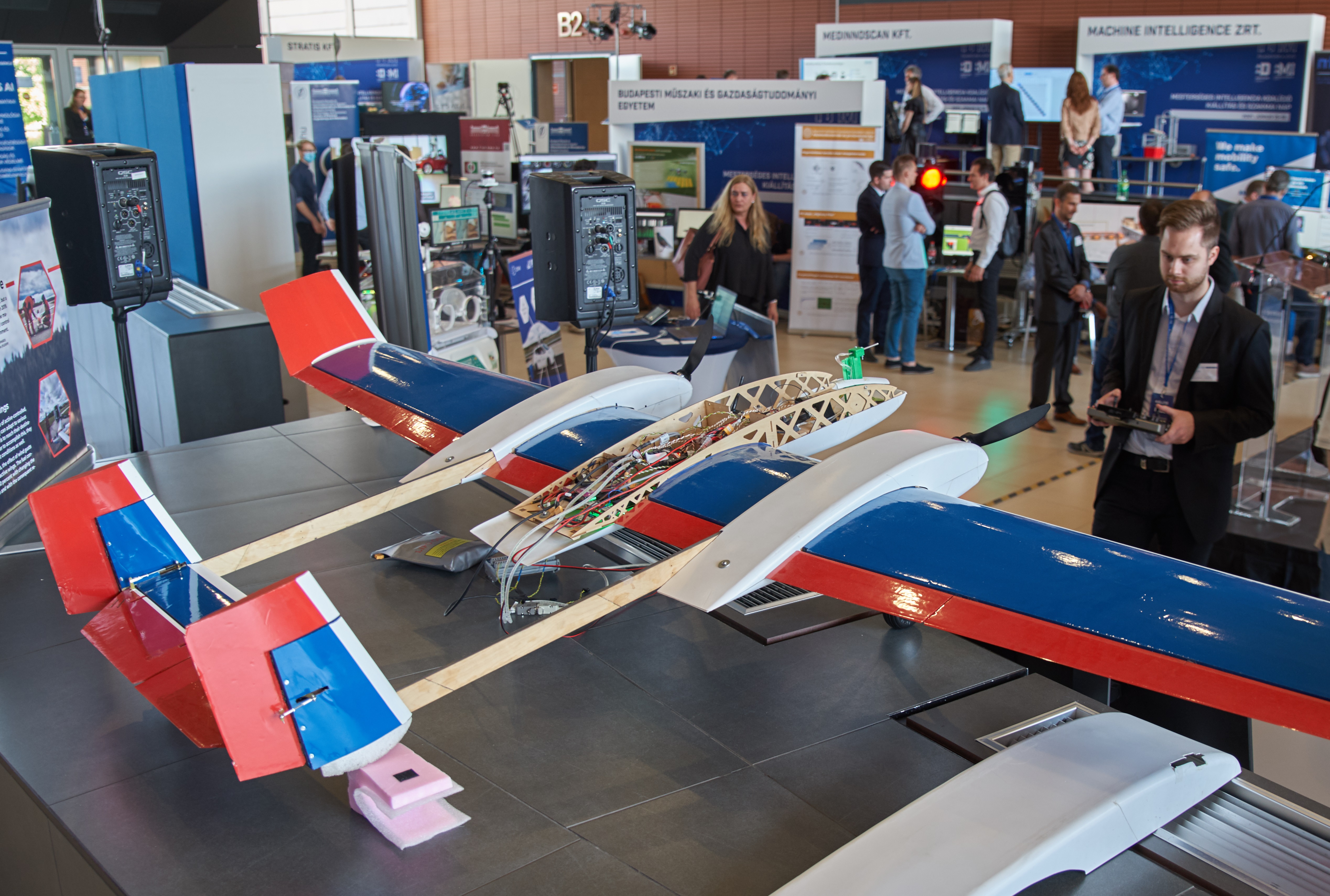
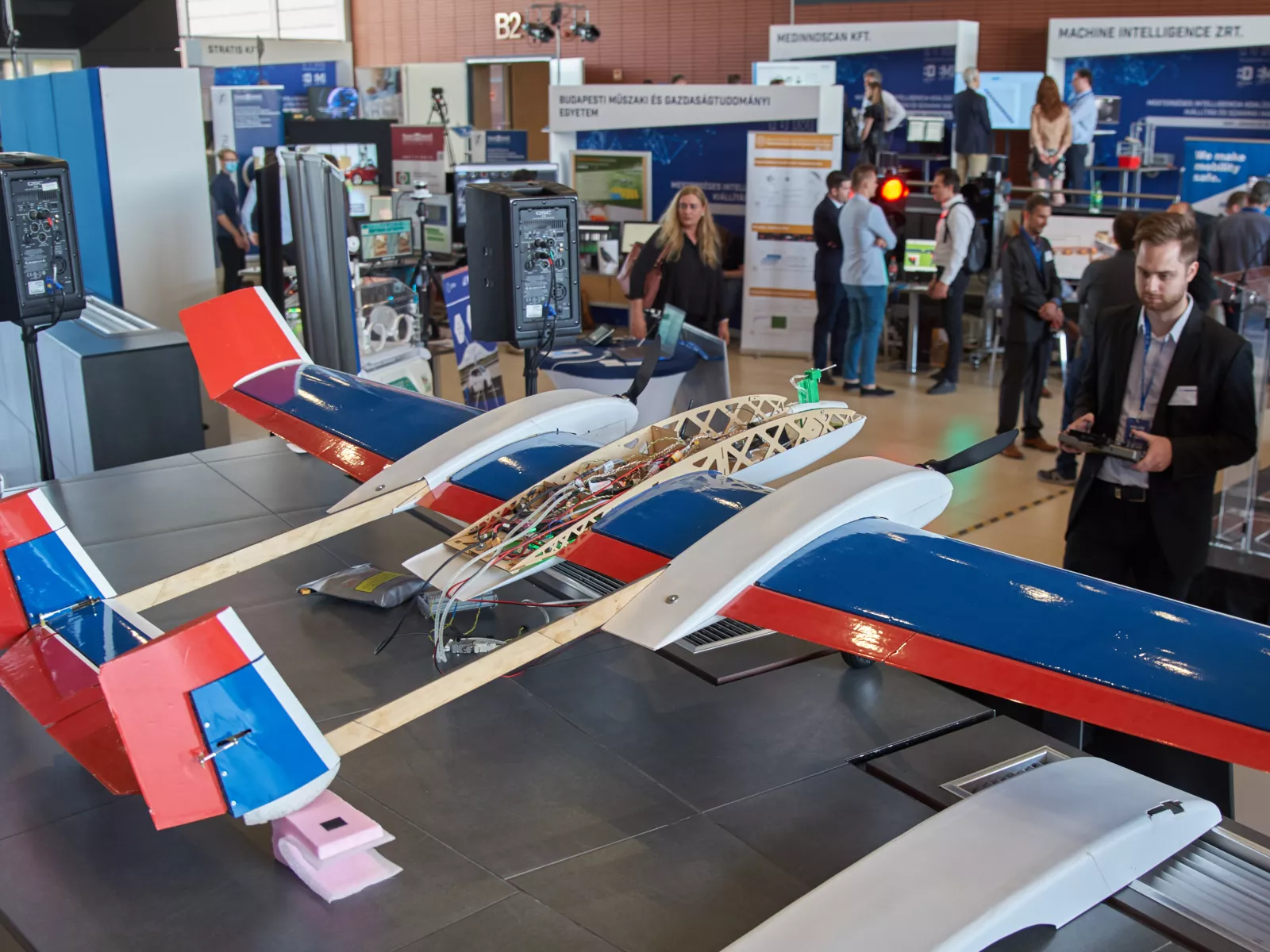
Bemutatásra került továbbá a SZTAKI Rendszer és Irányításelméleti Kutatólaboratóriumában fejlesztett, redundáns kialakítású pilóta-nélküli repülőgép is. Ez a repülőgép egyrészt egy, az EU kutatásban használt repülőgép-fedélzeti rendszer teszt platformja, másrészt nagy terhelhetősége folytán kiválóan alkalmas kamerák hordozására, és így a mesterséges intelligencián alapuló (AI) módszerek fedélzeti kipróbálására, például a ”látni és elkerülni” feladatokban. Az említett EU projektben cél az üzemanyag-fogyasztás csökkentése, ill. a teherhordó képessége növelése különösen karcsú, rugalmas szárnyak alkalmazásával. A szűk kiállítási tér miatt valós repülés nem volt lehetséges, ezért a robotpilóta útvonalpont-követési képességei kerültek bemutatásra: hardware-in-the-loop szimulációban, vagyis a fedélzeti hardver a repülőgép szimulált modelljét vezette valós időben.