

Researchers of the National Laboratory of Autonomous Systems (NLAS) have been developing a simulation framework that maps and models the Smart City (SC) part of the ZalaZONE automotive test ground. The framework can handle and model different traffic characteristics. An interesting feature of the framework is that the signalling plans applied to the junctions in SC can be changed either in a scheduled manner, or in a traffic condition-driven manner during a simulation.
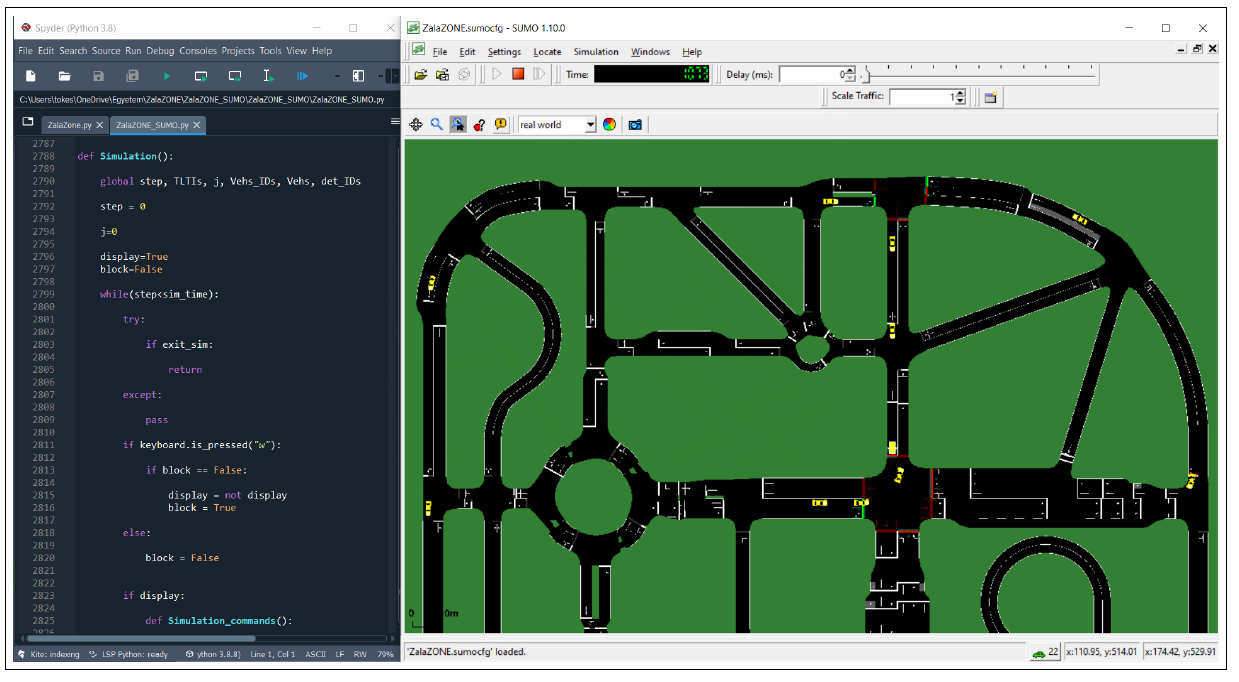
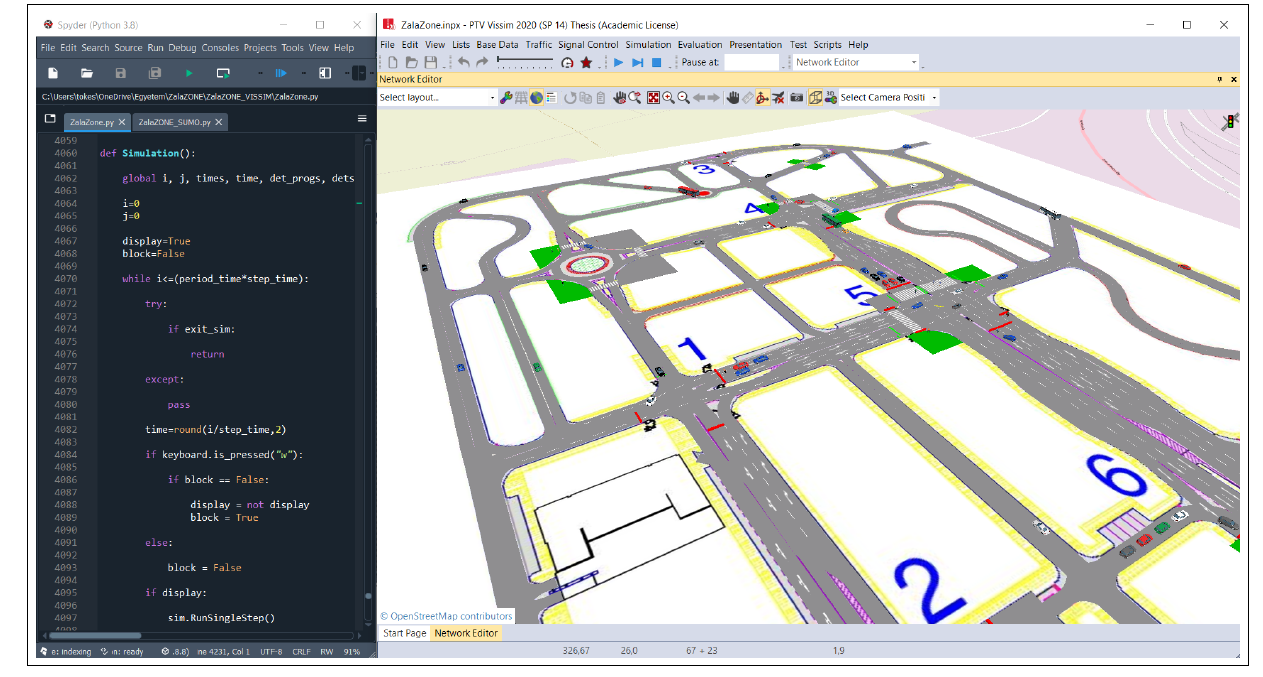
The PTV VISSIM and SUMO traffic flow simulators are used with the above framework. These simulators have different advantages and to make the best of these both have been interfaced to the mentioned framework.