Mar 22, 2022
Researchers at Széchenyi István University have developed an algorithm that can detect hard shoulders and free drivable road areas in real time from 3D LIDAR point clouds.
As a member of the National Laboratory of Autonomous Systems (NLAS) consortium, Széchenyi István University (SZE) carries out research in the field of road environment detection. In its research centre, an algorithm has been developed that can recognise the hard shoulder of a road and the free drivable area in real time from 3D LIDAR point clouds. The processing speed is at least 20 frames/s. Apart from having been published, also the full source code and some sample data are available for the algorithm. So, the runs and results can be reproduced by anyone. The code and the sample data can be accessed from https://github.com/jkk-research/urban_road_filter .
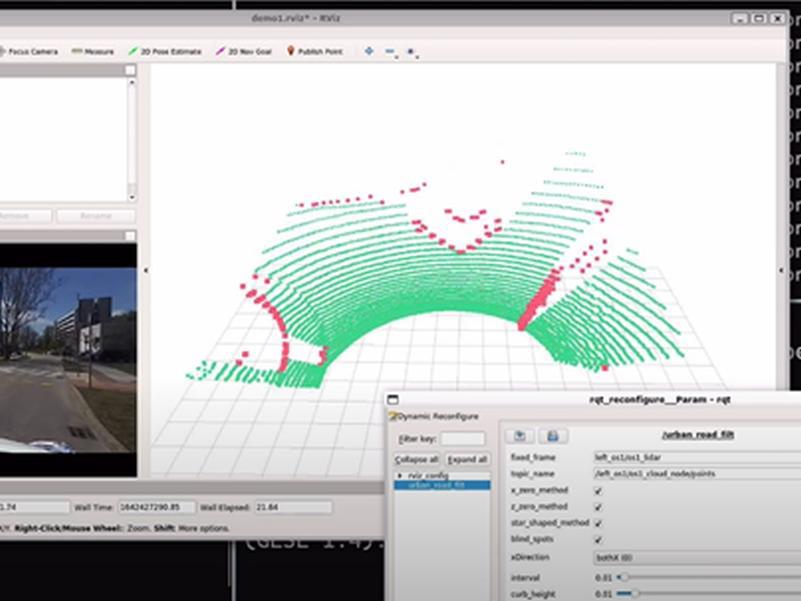
In the short video appearing below, the usage of the raw LIDAR point-cloud data is demonstrated. First, this data needs to be downloaded, and played. Then the algorithm needs to be downloaded and started, finally the resulting segmentation data is to be displayed and played. The sample point-cloud sequences were recorded at the campus of SZE and at the ZalaZONE Vehicle Proving Ground, respectively.