
„Önvezető gokart és forgalomirányító berendezés vezetéknélküli kommunikációja” címmel tartottak bemutatót a Közlekedés- és Járműirányítási Tanszék kutatói.
A Közlekedés- és Járműirányítási Tanszék kutatói az ARNL keretein belül “Önvezető gokart és forgalomirányító berendezés vezetéknélküli kommunikációja” címmel tartottak bemutatót a BME kampuszán néhány hete.
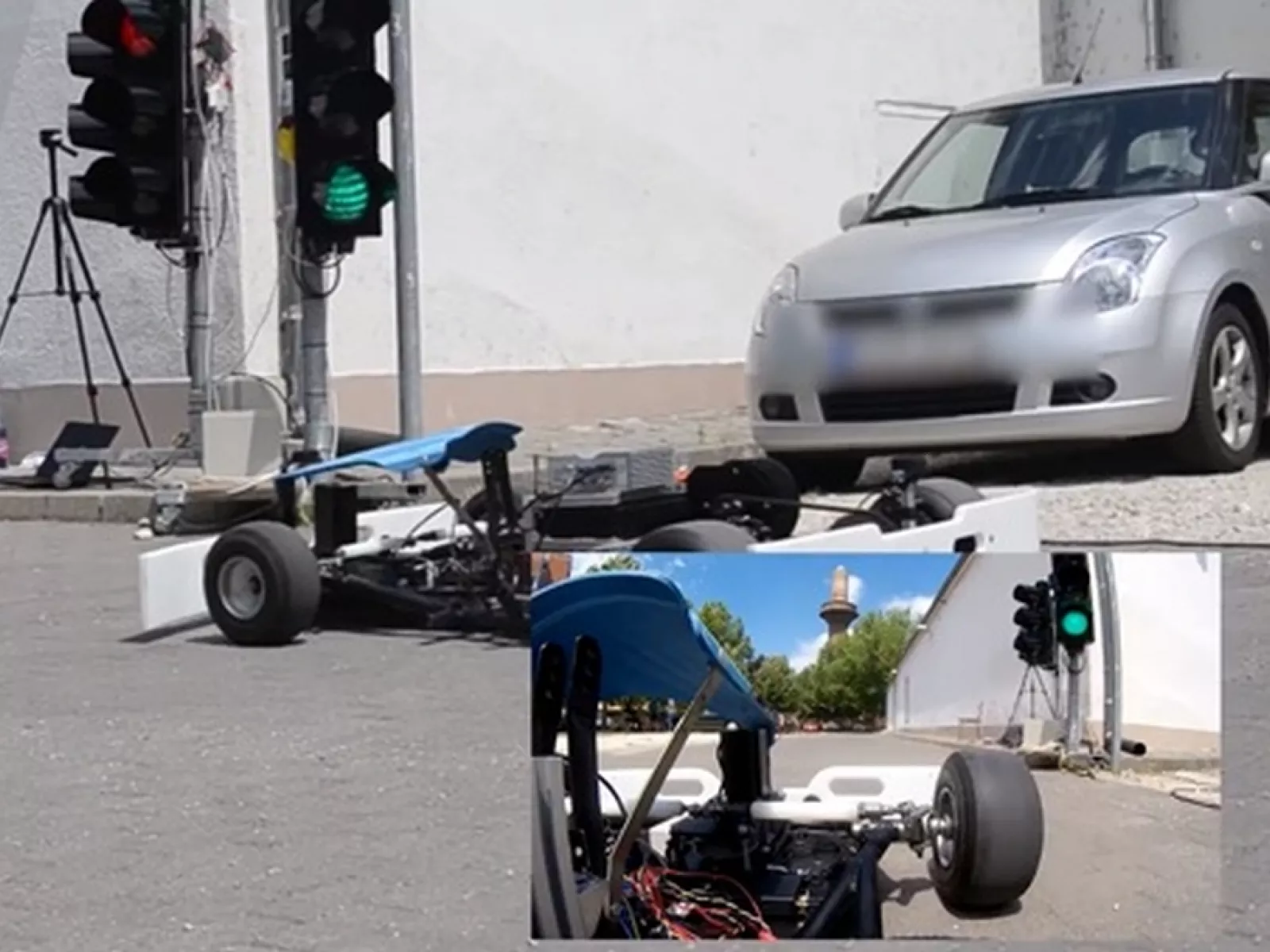
A bemutató célja a jövő okos városainak forgalomirányításában alkalmazható módszerek, megoldások működés közbeni demonstrálása volt. A bemutatón a tanszéken fejlesztett önvezető gokartok és a tanszéki közlekedésirányítási labor PLC vezérlésű jelzőlámpái játszották a főszerepet. A gokart vezeték nélkül kommunikált egy központi számítógéppel, amely egy jelzőlámpát is vezérelt. Ezen felül a számítógépen valós időben futott az aktuális szcenárió 3D-s környezetben elkészített digitális másolata is.
Az első szcenárióban az adaptív jelzőlámpa érzékelte az önvezető jármű közelségét és ennek megfelelően egy másik programra kapcsolt át. Egy ilyen adaptív jelzőlámpa, például éjszaka – amikor a jelzőlámpák sárgán villognak – növelheti a közlekedés biztonságát. A második és harmadik szcenárió célja a forgalomirányító berendezés digitális másolatának bemutatása volt. Az előbbiben a jelzőlámpa normál üzemmódban üzemelt, míg az utóbbiban egy meghibásodást szimulálva sárgán villogott. A jelzéskép hibája ellenére – redundáns megoldás használatával – a berendezés továbbra is képes volt a helyes állapotról a közeledő önvezető járművet értesíteni. Ehhez vezeték nélkül (V2I) kommunikációt használt. E szcenárió az egyetemi kampusz nagy pontosságú 3D-s modelljének felhasználásával, szimulációs környezetben is bemutatásra került.
A negyedik szcenárióban egy vezetéstámogató rendszer került bemutatásra. A forgalomirányító berendezés egy ajánlott sebességet közvetít a közeledő jármű számára. Az ajánlott sebesség betartása esetén a jármű megállás nélkül haladhat át a jelzőlámpás csomóponton.