
Researchers at the Department of Control for Transportation and Vehicle Systems of the Budapest University of Technology and Economics gave a live demonstration on how self-driving go-karts and a traffic control unit can communicate and cooperate via wireless connection.
In the frame of NLAS, the researchers at the Department of Control for Transportation and Vehicle Systems of the Budapest University of Technology and Economics (BME) recently demonstrated live how self-driving go-karts and a traffic control unit communicate and cooperate via wireless connection. The demo was held on the university campus.
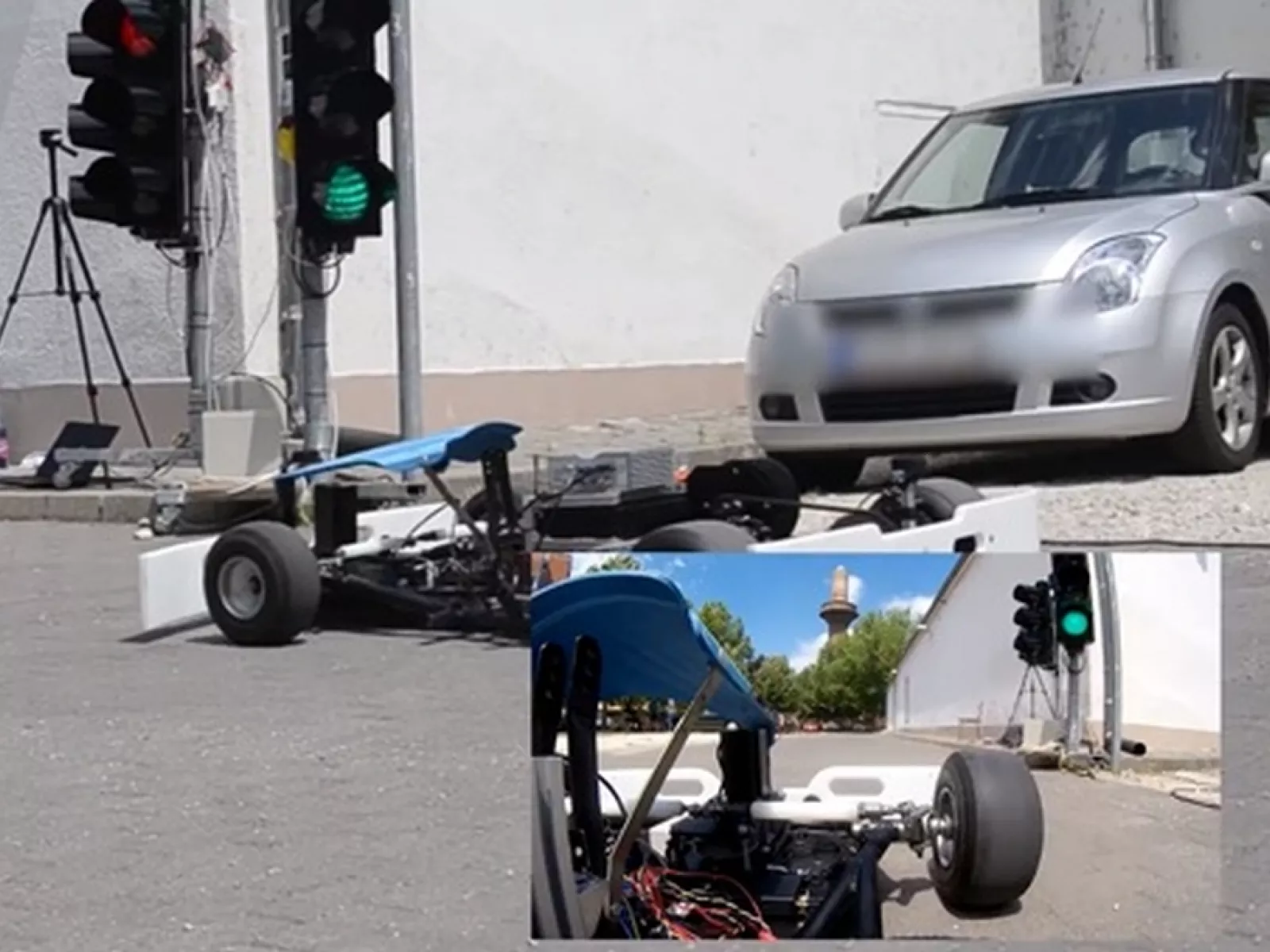
The aim of this demo was to present a number of methods that could find application in traffic control within and for a smart city. Self-driving go-karts developed at the department and a PLC controlled set of traffic lights normally located in the department’s traffic control lab played the main roles in the open-air demo. The communication between the go-karts and the traffic control unit was arranged through a central computer. The computer was used also for displaying the virtual versions of the actual scenarios. The virtual scenarios took place within pre-defined 3D built environments and used the digital twins of the go-karts and those of the traffic lights.
In the first scenario, a responsive traffic light was demonstrated. It detected the approaching self-driving car and switched to another operation mode. Such a responsive solution can be used to enhance traffic safety, e.g., during the night when traffic lights often operate in a caution light mode. In the second and third scenarios, the digital twin of the traffic control unit was demonstrated. In the second, the traffic light controlled by the traffic control unit worked in normal mode, while in the third, it worked in caution light mode, e.g., due to some malfunction detected within the traffic control system. Even though there was some fault injected into the system, and so the caution light mode was on, by relying on the redundant communication capability via the V2I communication channel, the traffic control unit could send its correct operational states to the approaching vehicle. This scenario was also demonstrated via simulation built upon the high-precision 3D geographic model of the university campus.
In the fourth scenario, a driver assistance system was demonstrated. The traffic control unit broadcast the suggested speed for the approaching vehicles. Complying with this speed, they could traverse the signalled crossing without stopping, if not, then they had to stop.