
Térképezési és objektum rekonstrukciós feladatoknál a kamera-paraméterek kalibrálásán túl kiemelkedően fontos a drón és gimbal paraméterek ellenőrzése is különös tekintettel az orientációkra. A HUN-REN SZTAKI kutatói, akik az ARNL-ben is tevékenyen részt vesznek, a DJI M300 drón és a Zenmuse P1 kamera-rendszer orientáció stabilitására speciális teszteket terveztek és szerveztek a ZalaZONE Smart City-be.
Egy ismert irányú és végpontú útszakasz felett először úgy repültek el oda-vissza, hogy a drón csak a kiszámolt irányt tartja, így ha a drón orientációja hibás, akkor nem az útszakasz túlsó végére érkezik. Másodszor az útszakasz felett kijelölt egyenest követték a robotpilótával így az úthoz képest a kamera eltérése érzékelhető, ha van ilyen.
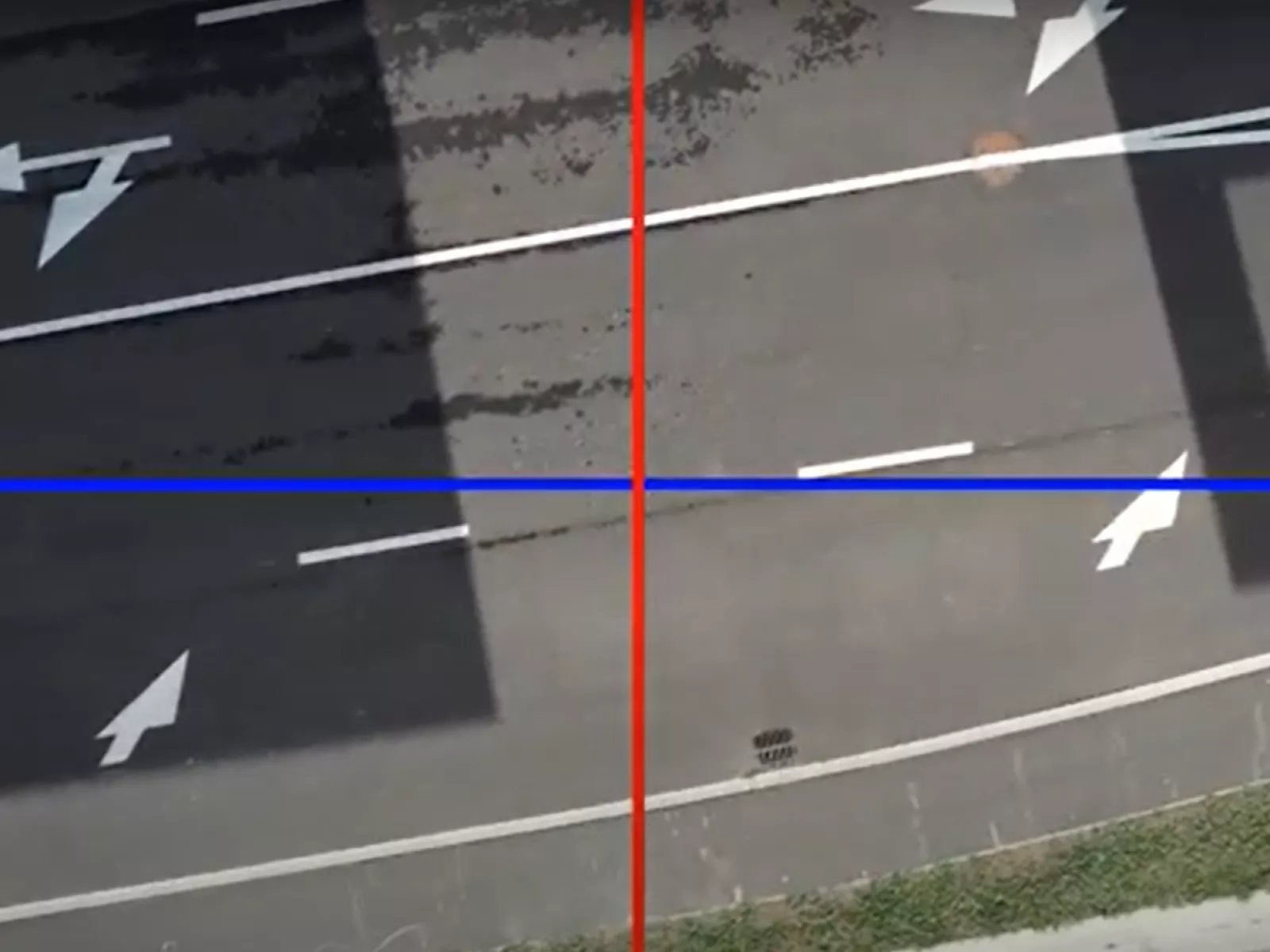
A mellékelt videón jól látszik, hogy a drón minden esetben megfelelően követte a kijelölt útszakaszt és a gimbal is tartotta a beállított szöget.
Videó: DJI M300 orientációs tesztek ZalaZONE Smart Cityben
A videón a DJI M300 kitűzött útszakasz feletti oda-vissza repülése látható a földről és a fedélzeti kamera nézőpontjából. A felvételen az látható, hogy a drón a saját orientációja alapján jól követi az utat és a kamera is stabilan tartja a beállított szögeket.