2022. júl. 29.

Az Autonóm Rendszerek Nemzeti Laboratórium keretében szerteágazó kutatások zajlanak az egyes külön-külön járműfajták irányításán túl az úgynevezett kooperatív irányítás témakörében is. Különleges kihívás a heterogén járműfajták (úgymint ember vezette gépjármű és drón, autonóm földi jármű és drón) kooperatív irányítása, hogy azok összehangoltan hajtsanak végre közös feladatot. Egy földi egység –drón kooperatív irányítás sikeres tesztjeire került sor július 1-én az ELKH SZTAKI munkatársai közreműködésével.
A megoldás teszteseteket adó közvetlen alkalmazása a Széchenyi Egyetemen az „Innovatív járműipari tesztelési és vizsgálati kompetenciák fejlesztése a nyugat-magyarországi régióban a zalaegerszegi Járműipari Tesztpálya infrastruktúrájára támaszkodva GINOP-2.3.4-15-2020-00009” projekt keretén belül az FT2 „Autonóm földközeli légi megoldások” alprojekt előfutár drón koncepciója, (lásd: itt és itt ) ahol egy ember vezette autó előtt kell haladni a kamerás drónnal és a sofőrt a takarásban való veszélyekre figyelmeztetni.
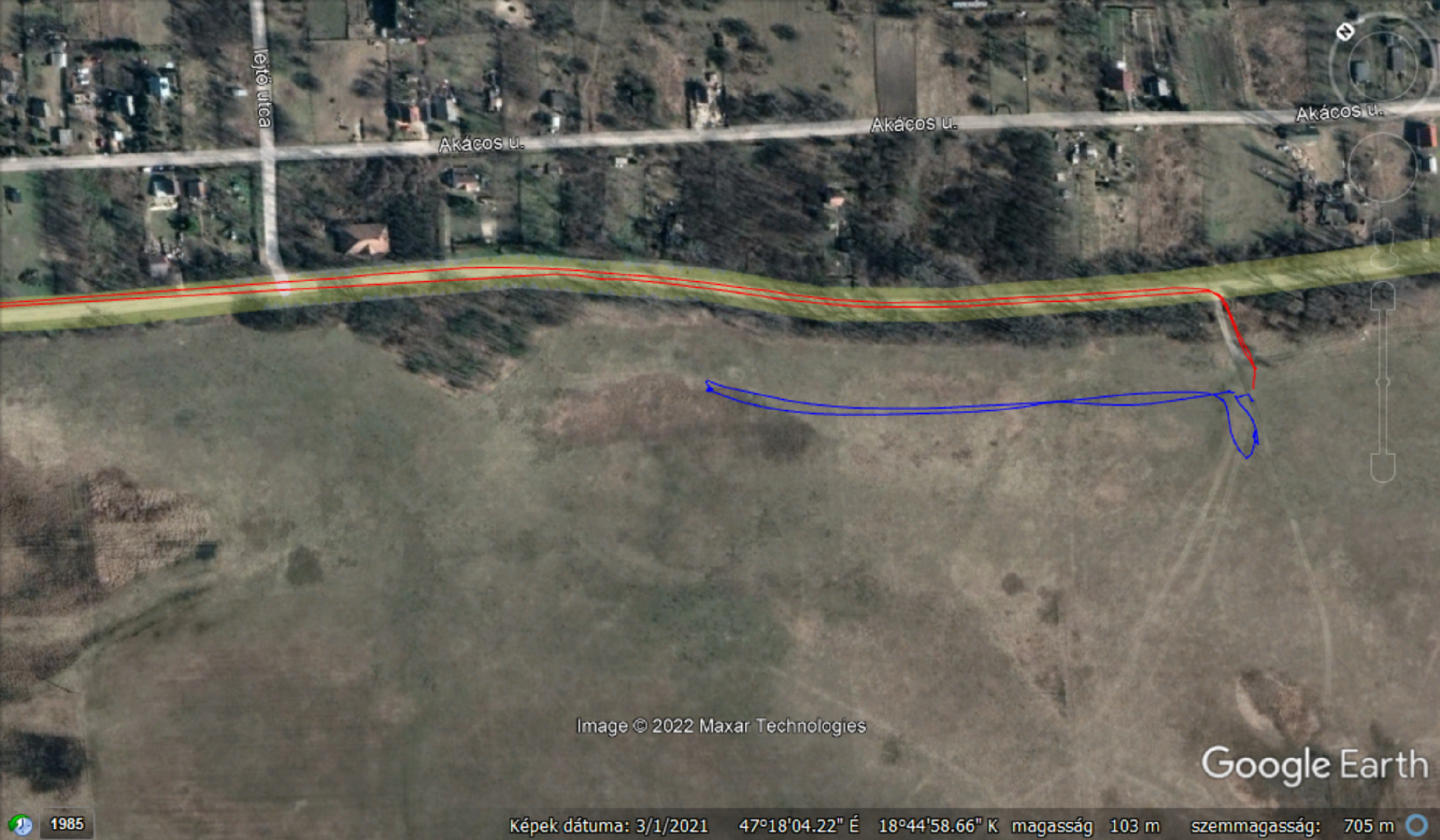 Így a tesztelt kooperatív irányítás a földi egység (lehet mozgó ember is) vezeték nélküli kommunikáción felküldött pozíció és sebesség adataira támaszkodva vezérli a drónt a repülés során. Összesen négyféle konfiguráció került tesztelésre:
Így a tesztelt kooperatív irányítás a földi egység (lehet mozgó ember is) vezeték nélküli kommunikáción felküldött pozíció és sebesség adataira támaszkodva vezérli a drónt a repülés során. Összesen négyféle konfiguráció került tesztelésre:
- Mozgó ember követése a drónt 40m magasságban felette tartva (kollégánk a teljes földi egységet vitte magával)
- Úton mozgó autó követése 50m oldaltávolságot tartva, hogy a drón a szabadon használható biztonságos légtérben maradhasson. Ez a hosszirányú követés kiértékelését nem befolyásolja, ott a 0m távolság volt az előírás. Itt a repülési magasság 100m, hogy az autó benne legyen a kamera képben.
- A 2. eset, de a drónnal az autó előtt féktávolságban repülve, hogy a veszélyekre való figyelmeztetés időben érkezhessen.
- A 3. eset, de egy adott térbeli pontnál hosszirányban az autó fölé húzódva, erre később a kereszteződéseknél lesz szükség, mert ott a földi jármű vezetője eltérhet az eredetileg tervezett úttól.
Mind a négy eset tesztelése sikerrel zajlott a 2-4 esetekben a földi járművel 20, 30 majd végül 40km/h sebességgel haladva (a tesztekhez használt DJI M600 drón maximális sebessége 65km/h szélcsendben). A rendszer a legmagasabb sebességgel is elfogadható eredményeket produkált.
Az ember követése során a GPS adatok szerint a hiba 2-4 m volt, a Kolléga követése multikopterrel című videón is látható, hogy a kamera középpontja (szálkereszt) elég közel volt kollégánkhoz. Az eltérés a GPS követés 2-4m hibáján túl adódhat a kamerát tartó gimbal esetleges szögeltéréseiből is.
 Az autó követése során 20 km/h sebességen minden esetben kb. 1-2m az oldaltávolság és 3m a hosszirányú távolság hibája. 30 km/h és 40 km/h sebességen ezek az értékek már 2-3m és 4-5m-re változnak mutatva, hogy nagyobb sebességen nehezebb a követés. A képi adatok elemzése a GPS-ből kapotthoz hasonló követési hibákat adott. Az autó követése az Autó követése nulla távolsággal
és az Autó követése változó távolsággal
című videókon látható. A szálkeresztek itt az oldaltávolság figyelembe vételével mutatják, hogy hol kellene lennie az autónak ha nulla távolsággal követjük. Láthatóan a kezdeti átmenet után elfogadható az autó követése, a nulla távolság esetén a vízszintes vonal elég közel van az autóhoz.
Az autó követése során 20 km/h sebességen minden esetben kb. 1-2m az oldaltávolság és 3m a hosszirányú távolság hibája. 30 km/h és 40 km/h sebességen ezek az értékek már 2-3m és 4-5m-re változnak mutatva, hogy nagyobb sebességen nehezebb a követés. A képi adatok elemzése a GPS-ből kapotthoz hasonló követési hibákat adott. Az autó követése az Autó követése nulla távolsággal
és az Autó követése változó távolsággal
című videókon látható. A szálkeresztek itt az oldaltávolság figyelembe vételével mutatják, hogy hol kellene lennie az autónak ha nulla távolsággal követjük. Láthatóan a kezdeti átmenet után elfogadható az autó követése, a nulla távolság esetén a vízszintes vonal elég közel van az autóhoz.
A változó távolság esetén az autó előtt távolabb, majd fölötte, majd megint előtte kell lennie a vonalnak. Ez követhető is a videón, bár hosszabb tesztszakasz esetén több idő lenne a távolságoknak beállni. A drón egy idő után azért áll meg, mert onnantól kívül lenne a biztonsági pilóta kényelmes látótávolságán. Itt megvárja, míg visszatér az autó és álló helyzetből indulva újra követni kezdi. A repülés végén a drón egyszerűen megáll a kiinduló pont felett, ott már nem követi az útról letérő autót.