
A Széchenyi István Egyetem kutatói a valós járműveknél használt szenzorokat is modellező szimulátort fejlesztettek és alkalmaznak az objektum-felismerő és -követő módszereik fejlesztéséhez, teszteléséhez.
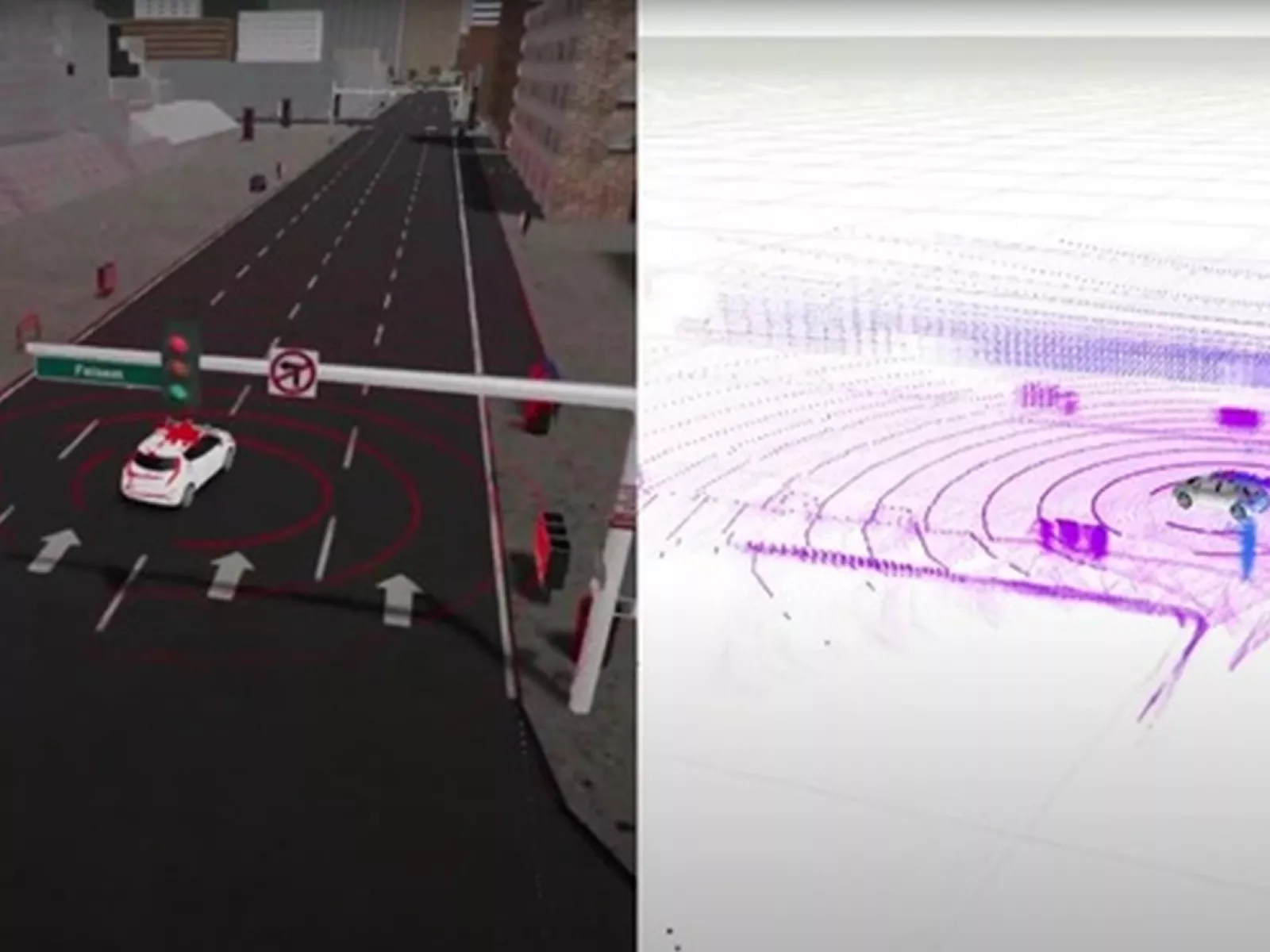
Az ARNL konzorcium tagjaként a Széchenyi István Egyetem (SZE) a környezetérzékelés területén végez változatos kutatási feladatokat. A jármű körül elhelyezkedő objektumok (pl. út, járművek) és persze emberek a legkülönbözőbb térbeli elrendezésekben fordulhatnak elő, így felismerésükhöz, valamint az autonóm járművekkel kapcsolatos fejlesztésekhez nagyszámú mérési adatnak kell rendelkezésre állnia. Az objektumok, valamint a közlekedő emberek felismerése és követése több és többféle szenzor fúziója segítségével oldható meg robusztus módon. A kutatók a szimulátort a valós járművön lévőkkel egyező virtuális szenzorokkal látták el (pl. kamerával, LIDAR-ral, és GPS vevővel). Az általuk továbbfejlesztett szimulátor ingyenesen letölthető és használható.
Egy-egy szcenárióban megjelenő objektumok detektálása és követése – ismételt és változatos feltételek mellett – valós mérések alapján, vagy szimuláció segítségével tehető meg. A valós mérések időigénye nagy, ezt az időigényt és a kapcsolódó költségeket igyekszenek a kutatók és fejlesztők szimuláció segítségével csökkenteni. Megjegyzendő, hogy a szimuláció segítségével automatizált teszteket lehet végrehajtani. Sokszor egy-egy újonnan fejlesztett algoritmus első változatát tesztelik így a kutatók. A szimuláció további előnye, hogy a még nem tesztelt algoritmusok biztonságos környezetben is kipróbálhatók a balesetek kockázata nélkül.