
Researchers at Széchenyi István University have developed and are using a simulator that models the usual sensors of autonomous vehicles to perform object recognition and tracking experiments and testing.
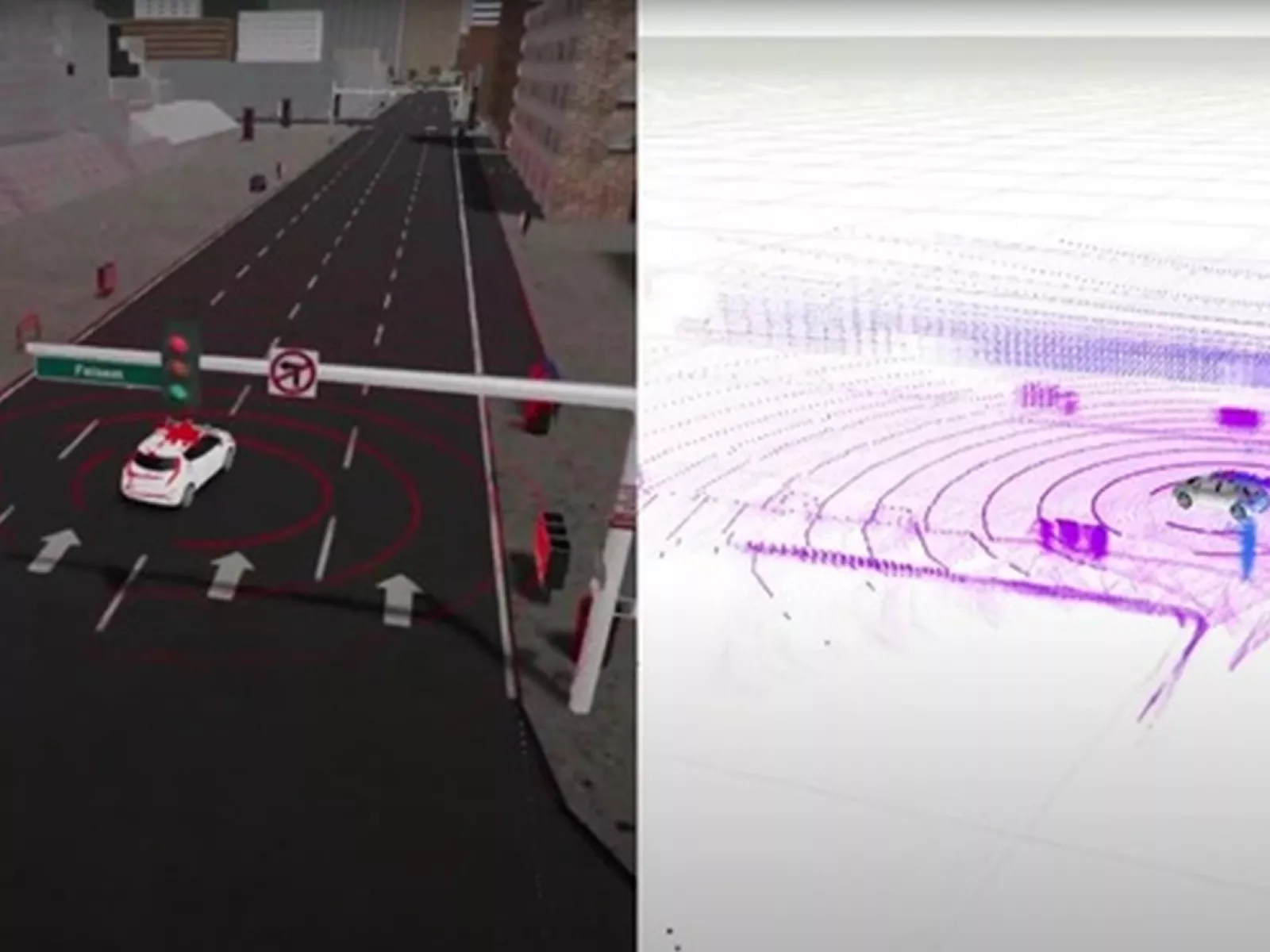
As a member of the National Laboratory of Autonomous Systems (NLAS) consortium, Széchenyi István University (SZE) carries out research in the field of road environment detection. Objects surrounding a vehicle (e.g. road, vehicles) and people can occur in various spatial arrangements, and thus, a large amount of measurement data is required to detect them reliably. Detection and tracking of such objects can be achieved in a robust manner by the fusion of several different sensors. The researchers have equipped the simulator with virtual sensors (e.g., virtual versions of cameras, LIDARs, GPS receiver) that mimic the real sensors that are commonly used on real intelligent vehicles. The upgraded simulator is freely downloadable and usable by the public.
In a given scenario, objects can be detected and tracked under repeated and varied conditions using either real measurements or simulation. The real measurements, which tend to be time-consuming to prepare and complete, are complemented by simulation. The latter can be used to perform automated repeated tests. In many cases, simulation is used to test the early versions of newly developed algorithms. An additional advantage of the simulation is that the yet untested algorithms can be tried out in a safe environment without the risk of real-world accidents.