
Az alprojekt célja a közúti forgalomban közlekedő járművek automatizált és autonóm működésével kapcsolatos irányítások analízis-, valamint szintézis-módszereinek kutatása.
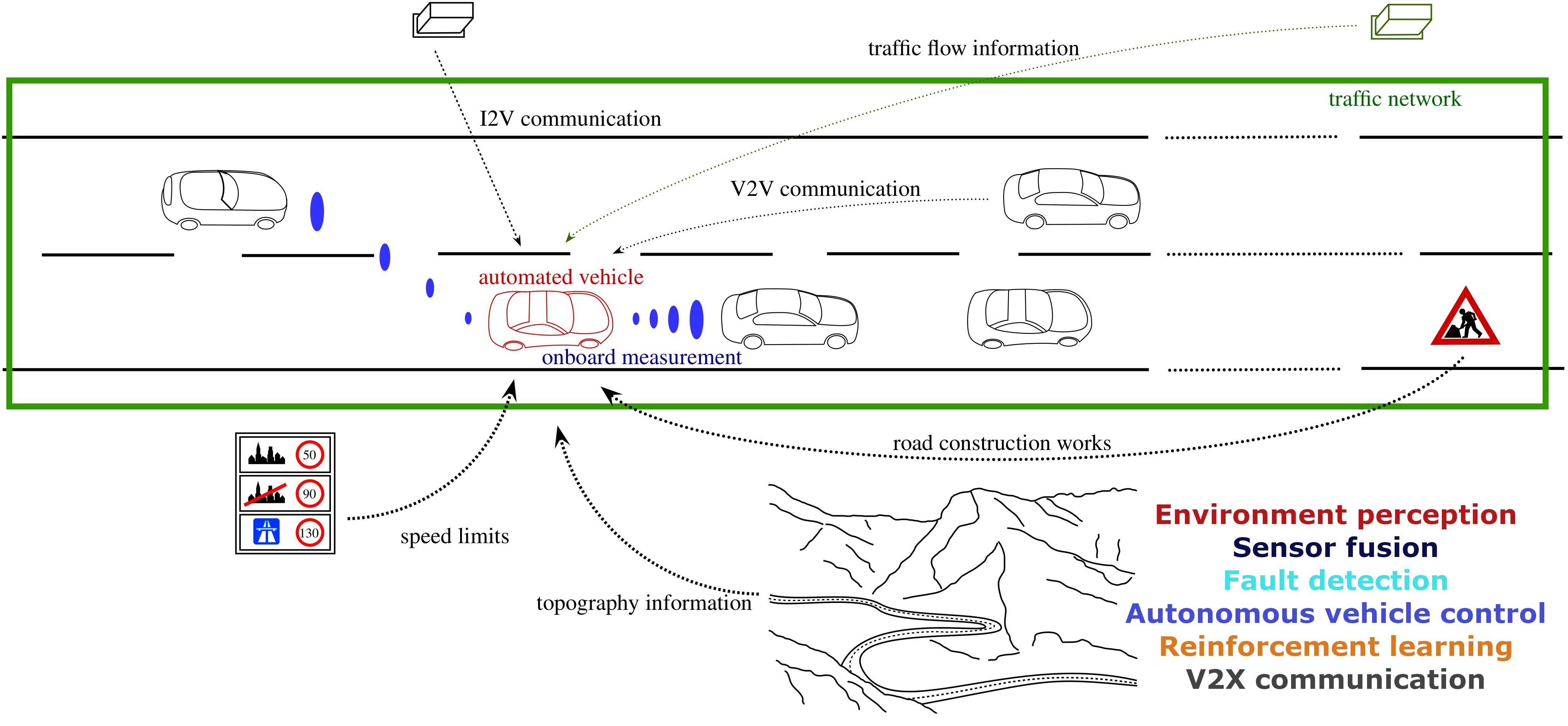
A járműfunkciók hatékony megvalósítása magában foglalja a környezetérzékelési feladatokban rejlő műszaki kihívások megfelelő kezelését, a szükséges szenzorfúziós és hibadetektálási megoldások kidolgozását, az irányítórendszerek garantált minőségű tervezését, továbbá a tanulási algoritmusok és korszerű járműkommunikációs rendszerek alkalmazását és tesztelését.
Az autonóm rendszerek irányításának tervezésében fontos bemeneti információként szolgál a környezet megfelelő interpretációja. A kutatás a környezetben detektált és beazonosított objektumok mozgásának predikciójára irányul. A predikció a járművek dinamikus modelljeinek felhasználásával, jellemzően a Bayes következtetésen alapuló technikák alkalmazásával történik.
Az autonóm járművek kommunikációs és szenzorhálózatain jelentős mennyiségű, a járműdinamikai, valamint a jármű környezetére vonatkozó adat érhető el. Az itt előálló adathalmaz elemzése alapján lehetővé válik a jármű, valamint a közlekedési rendszerek irányíthatósági tartományainak becslése, amely az irányítórendszerek és járművek kooperatív összehangolásának az alapja. Új kutatási terület a gépi tanulásra és hatékony számítási és optimalizálási módszerekre épülő korszerű irányítások kidolgozása. E kutatások a klasszikus irányítástervezési eljárások alkalmas tanuló struktúrákkal történő kombinálását célozzák az irányítási módszerek valós idejű implementálása céljából.
Vezetőnélküli légi járművek (UAV-k) esetében kutatási és fejlesztési kihívásokat jelentenek a különféle szenzorok, többkamerás látórendszerek, kommunikációs eszközök, valamint az egyes beavatkozók működésének összehangolása, továbbá a légi járművek összehangolt mozgásának megtervezése, valamint a repülés végrehajtása is.
A kutatás megvalósításában több kutatócsoport dolgozik együtt a SZTAKI és a BME részvételével.