
The goal of the work package is to research analysis and synthesis methods of control systems with automated and autonomous functionalities for road vehicles.
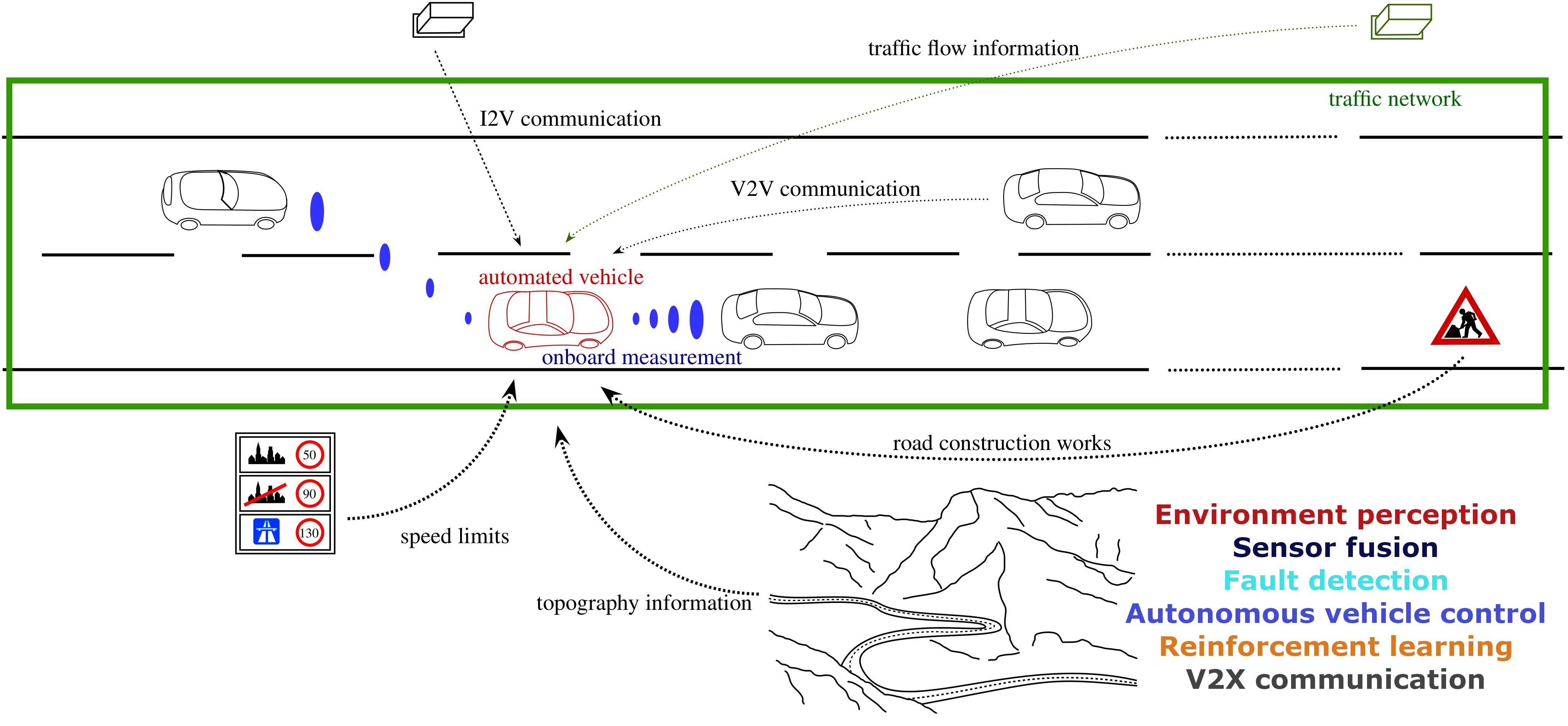
The efficient operation of the vehicle functionalities incorporates in the tasks of environment perception, sensor fusion and fault detection, autonomous vehicle control design, the application of deep-learning methods and the handling and testing of vehicle communication systems.
Proper interpretation of the environment serves as an important input in the management of autonomous systems. Research based on environmental perception through the prediction models of dynamic motion of objects typically focuses on the use of techniques based on Bayesian inference.
A significant amount of data is available on the communication and sensor networks of autonomous vehicles, which contains important information about the vehicle dynamics and the environmental characteristics of the vehicle. Based on the analysis of the data set, it becomes possible to estimate the controllability ranges of the vehicle and the transport systems, which is the basis for the cooperative coordination of the control systems and vehicles. A new area of research is the development of state-of-the-art controls based on machine learning and efficient computational and optimization methods. The aim is to combine classical control design procedures with learning structures for real-time implementation.
In the case of unmanned aerial vehicles (UAVs), research and development challenges include the coordination of the operation of various sensors, multi-camera vision systems, communication devices and individual interventions, as well as the planning of coordinated aircraft movements and flight execution.
In the research process the teams of Institute for Computer Science and Control and Budapest University of Technology and Economics are involved.